[latexpage]
Neulich bekam ich zufällig eine Aufgabe zum Thema Differentialgleichung in die Hände. Speziell ging es um das Modell eines Feder-Masse-Dämpfer System. Dieser Aufbau dient oft als Referenz eines schwingungsfähigen Systems in der Mechanik.
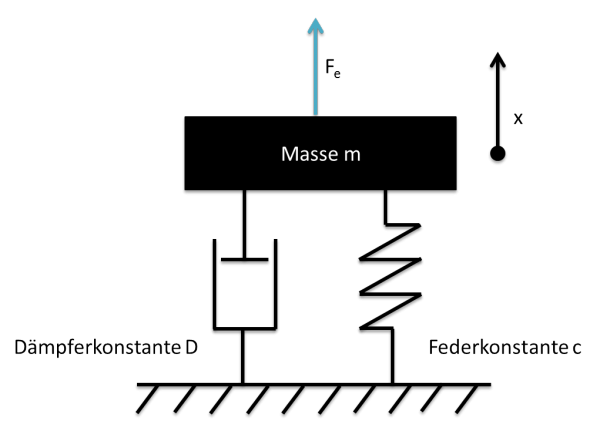
Eine von außen angreifende Kraft $F_e$ resultiert in einer Auslenkung x der Masse $m$. Gegen $F_e$ wirken die Kräfte der Masse $F_m$, der elastischen Feder $F_c$ und des Dämpfers $F_D$ entgegen. Die Summe aller Kräfte muss 0 ergeben, wobei die angegebenen Kräfte dabei einzeln betrachtet werden können.
Feder -> Kraft ist proportional zum Weg : \[ F_c (t) = c \cdot x(t)\]
Masse -> Kraft ist proportional zur Beschleunigung: \[F_m (t) = m \cdot a(t)\]
Dämpfer -> Kraft ist proportional zur Geschwindigkeit : \[ F_D(t) = D \cdot v(t)\]
Somit ergibt sich die Gleichung:
\[ F_e (t) – F_c (t) – F_m (t) – F_D (t) = F_e (t) – c \cdot x(t) – m \cdot a(t)-D \cdot v(t) = 0\]
Umgestellt nach $F_e$:
\[ F_e (t) = m \cdot a(t) + D \cdot v(t) + c \cdot x(t) = m \cdot \ddot x + D \cdot \dot x+ c \cdot x(t)\]
Wie man sieht, kann man das Feder-Masse-Dämpfer System auch als lineare Differenzialgleichung 2. Ordnung mit konstanten Koeffizienten beschreiben.
Feder-Masse-Dämpfer System: Einschwingverhalten
In der gestellten Aufgabe wurde das System mit einem Kraftsprung angeregt und gesucht wurde der zeitliche Verlauf des Einschwingvorgangs. Das System sollte mit Matlab/Simulink modelliert und anschließend simuliert werden. Da im privaten Bereich Matlab/Simulink nicht so weit verbreitet ist, wird hier das Programm Scicos verwendet. Mit Scicos erstellt man grafisch die benötigten Modelle mit vorgefertigten Blöcken und kann sie dann simulieren.
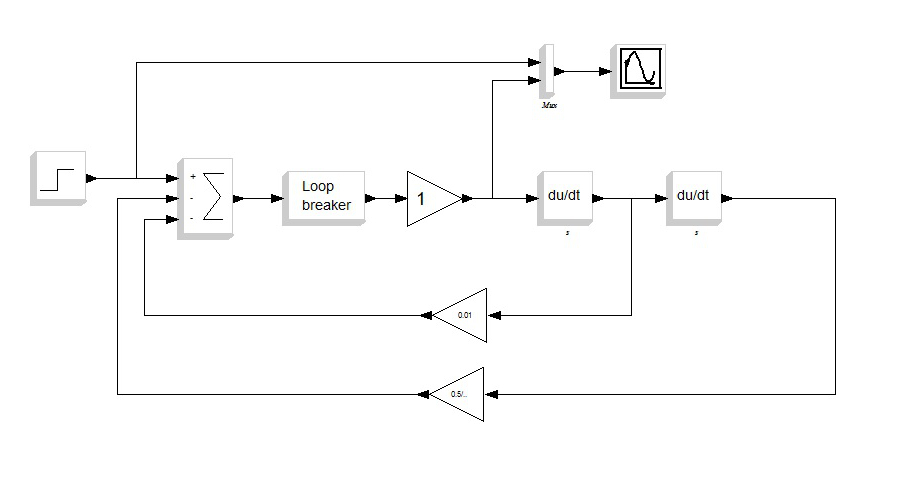
Das Modell ist aus den Standardblöcken aufgebaut und ähneln Simulink sehr stark. Der Block “Loop Breaker” wird benötigt, da das Feder-Masse-Dämpfer Modell in diesem Fall eine algebraische Schleife bildet. Das Oszilloskop zeigt den Kraftsprung und im gleichen Fenster die Auslenkung an.
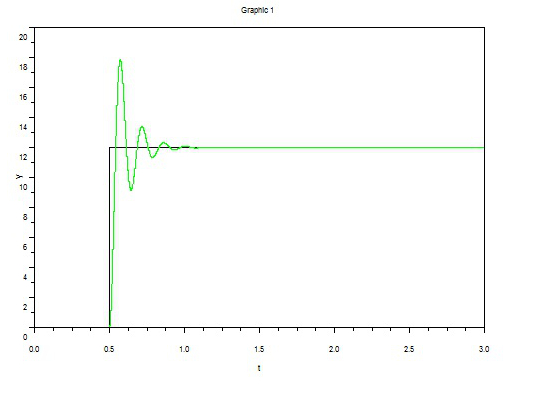
In dem zeitlichen Verlauf sieht man sehr schön die Schwingungsfähigkeit des Feder-Masse-Dämpfer Systems und ab wann das System im eingeschwungenen Zustand ist.
Alternatives Feder-Masse-Dämpfer-Modell
Der “Loop-Breaker”-Block ist natürlich nicht so schön und generell ist es wohl besser, wenn man die Gleichung nach der höchsten Ordnung umstellt:
\[ \ddot x = \frac{F_e (t)}{m} – \frac{D}{m} \cdot \dot x – \frac{c}{m} \cdot x(t)\]
Das ergibt dann folgendes Schaltbild (diesmal in Matlab/Simulink):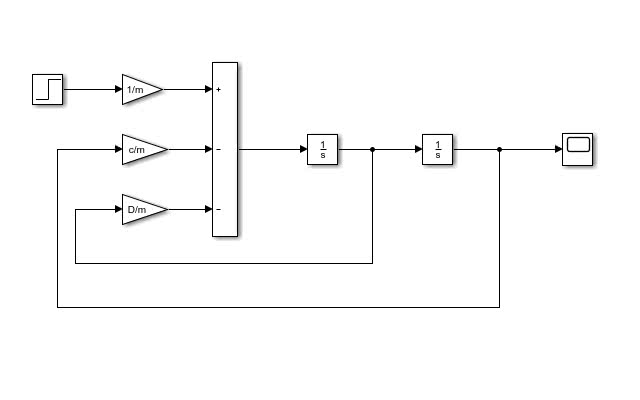 Falls ihr tiefer einsteigen wollt, gibt’s hier eine Liste interessanter Bücher (Links führen zu Amazon):
Falls ihr tiefer einsteigen wollt, gibt’s hier eine Liste interessanter Bücher (Links führen zu Amazon):